Postęp w chirurgii kręgosłupa stymulowany rozwojem nowoczesnej technologii na bloku operacyjnym
Robotyzacja
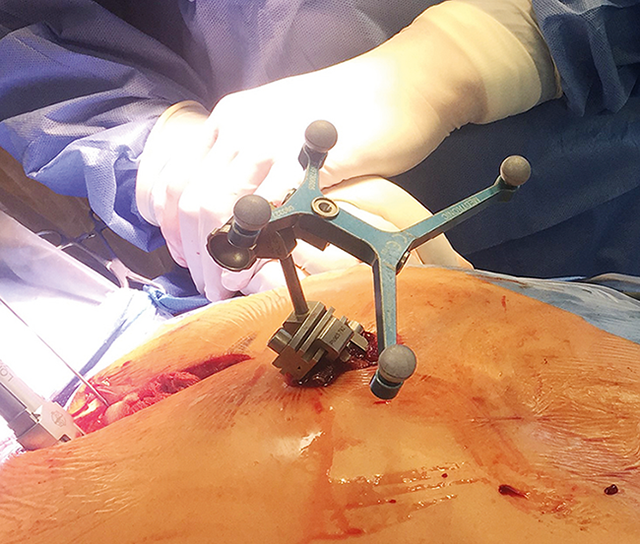
Wiele powtarzalnych, predefiniowanych czynności może być z całą pewnością szybciej i dokładniej wykonanych przez roboty. Nie jest więc zaskoczeniem, że do takich właśnie etapów zabiegu próbuje się znaleźć dla nich zastosowanie. Typowym przykładem, spełniającym wymienione kryteria, jest często stosowana w chirurgii kręgosłupa stabilizacja przeznasadowa. Dostępnym komercyjnie robotem operacyjnym stosowanym w chirurgii kręgosłupa jest Mazor X (fot. 10). Tutaj, podobnie jak w przypadku neuronawigacji, wykonujemy skan operowanego segmentu kręgosłupa, jest on przesyłany do stacji roboczej nawigacji, następnie ustalany jest lub ładowany wcześniej przygotowany plan umieszczenia implantów. Kolejnym krokiem jest rejestracja ramienia robota w relacji przestrzennej do struktur kręgosłupa, które wprowadza implanty zgodnie z ustaloną trajektorią.
Wydaje się, że integracja urządzeń pozyskiwania i nakładania obrazu z MRI, TK i RTG z systemami nawigacyjnymi i zminiaturyzowanymi robotami będzie jednym z istotnych kierunków rozwoju.
Spojrzenie w przyszłość
Nie tylko wysokospecjalistyczny sprzęt na bloku operacyjnym wspierany zaawansowaną elektroniką oraz komputerami jest elementem postępu, ale także ciągle ewoluujące istniejące już narzędzia chirurgiczne, stoły operacyjne, wiertarki i wiele innych elementów wyposażenia sali operacyjnej. Narzędzia chirurgiczne dostosowują się do zmiany technik operacyjnych, zmieniając swoje kształty, konstruowane są z materiałów przeziernych w promieniach rentgenowskich lub kompatybilnych z silnym polem elektromagnetycznym przy zastosowaniu śródoperacyjnego MRI.
Można sobie wyobrazić, że kolejnym szerokim polem rozwoju będzie udoskonalanie technik wirtualnej rzeczywistości (VR – virtual reality). Już teraz są one wykorzystywane do nauki anatomii chirurgicznej, w szczególności aspektów wymagających doskonałej wyobraźni przestrzennej, np. anatomii naczyń mózgowych. Jednak dopiero VR w połączeniu z zaawansowaną symulacją percepcji dotykowej mogłoby znacząco ułatwić i przyspieszyć naukę chirurgii dla młodych adeptów i umożliwiłoby sprawniejszą naukę nowych dostępów dla bardziej doświadczonych.
Wydawać by się mogło, [...]






Komentarze





Czytaj najciekawsze teksty branżowe
Dołącz do odbiorców newslettera!
Strefa wiedzy
712 praktycznych artykułów - 324 ekspertów - 16 kategorii tematycznych


















Czytaj najciekawsze teksty branżowe
Dołącz do odbiorców newslettera!