Systemy neuronawigacji mózgu − technologia na miarę XXI wieku

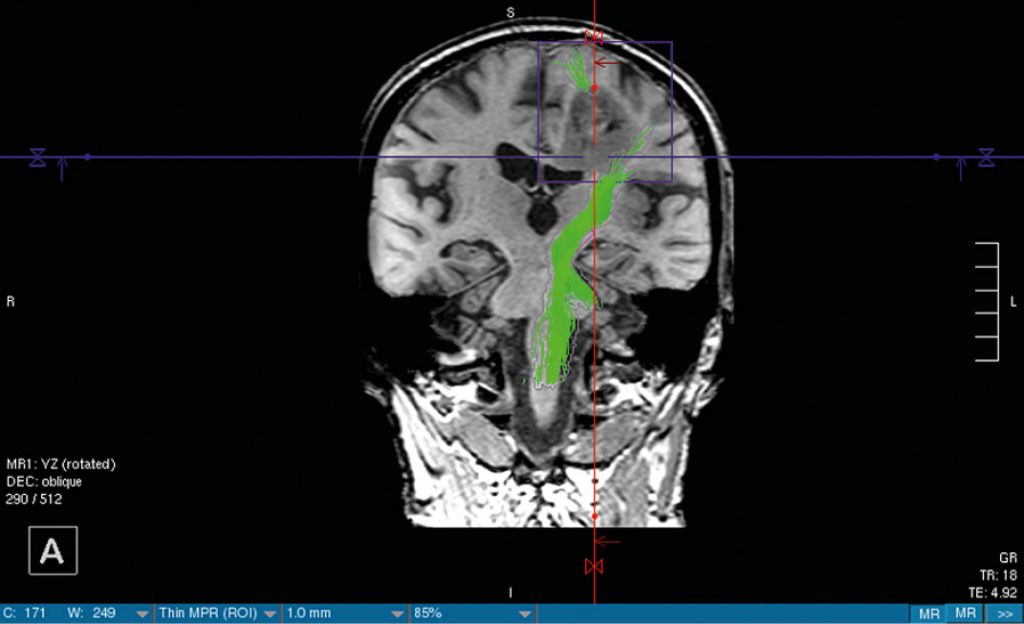
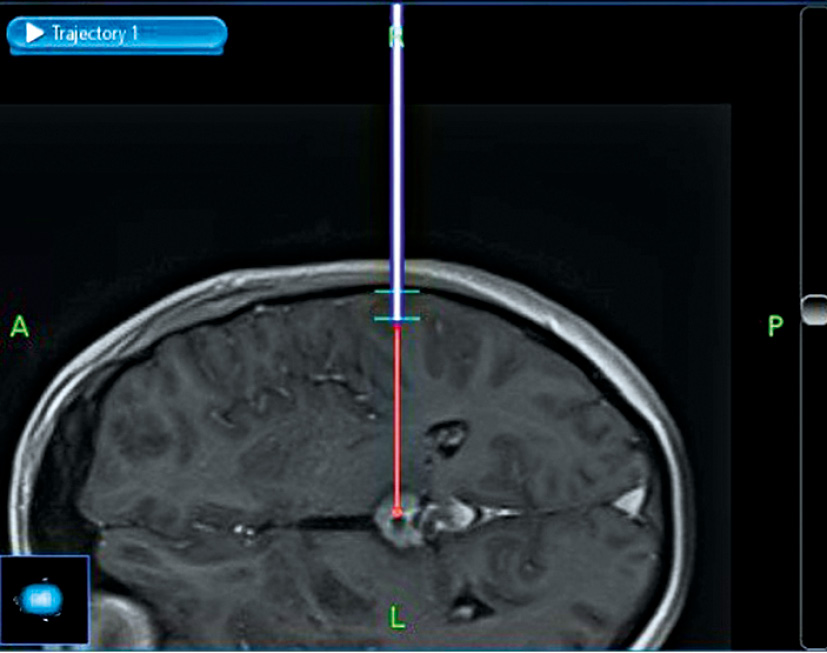
Neuronawigacja jest dzisiaj naprawdę skomplikowanym procesem wykonywanym w oparciu o wyrafinowane systemy komputerowe, składającym się z kilku powiązanych wzajemnie etapów. Patrząc od strony technicznej, neuronawigacja może być realizowana przez urządzenia działające na różnych zasadach fizycznych, najbardziej rozpowszechnione są systemy lokalizacji optycznej oraz magnetycznej.
Problem właściwej, czyli trafnej orientacji w polu operacyjnym, towarzyszył neurochirurgii od samego początku, czyli od czasu, kiedy zaczęła wyodrębniać się jako osobna gałąź chirurgii. Nawet najlepsza znajomość anatomii nie na wiele się przydaje, kiedy w obrębie rozległych i identycznych z wyglądu obszarów istoty białej mózgu należy odszukać niewielką, centymetrowej wielkości zmianę patologiczną: guz, naczyniak czy ropień. Ideałem jest oczywiście trafienie do takiej zmiany jak najkrótszą drogą, z ominięciem ważnych czynnościowo struktur mózgu, jego naczyń i nerwów.
Motywowani tym imperatywem, już nawet XIX-wieczni pionierzy neurochirurgii (którzy byli jeszcze chirurgami ogólnymi), jak Victor Horsley czy Robert Clarke, stworzyli ideę stereotaksji (podążania do celu w przestrzeni trójwymiarowej), która ewoluując w kolejnych latach, umożliwiła planowanie trajektorii najlepszego dojścia do miejsca interwencji operacyjnej w mózgu. W tym celu trójwymiarowy mózg został formalnie wpisany w kartezjański układ współrzędnych, tak aby każde z jego miejsc i struktur mogły zostać ściśle zlokalizowane poprzez rzutowanie na trzy płaszczyzny – wieńcową (coronal), strzałkową (sagittal) oraz osiową (axial). I chociaż ta metoda stosowana była już od lat dwudziestych (do lokalizowania tych struktur [...]
Galeria
Komentarze





Czytaj najciekawsze teksty branżowe
Dołącz do odbiorców newslettera!
Strefa wiedzy
712 praktycznych artykułów - 324 ekspertów - 16 kategorii tematycznych


















Czytaj najciekawsze teksty branżowe
Dołącz do odbiorców newslettera!