Polska RobotLova, czyli inwazja robotów

Robotyka chirurgiczna w Polsce znajduje się w punkcie zwrotnym. Z jednej strony – rosnące zapotrzebowanie na procedury małoinwazyjne oraz niedobór kadry chirurgicznej wymuszają modernizację narzędzi operacyjnych. Z drugiej – brak systemowego podejścia i polityki przemysłowej skutkuje utratą szansy na rozwój własnego przemysłu robotowego.
Robot znaczy Słowianin. Ponad 100 lat temu czeski pisarz Karel Čapek wprowadził do języka świata słowo „robot”. Pochodzi ono od staroczeskiego robota – przymusowej pracy chłopa pańszczyźnianego. W sztuce R.U.R. roboty były mechanicznymi sługami, przypominającymi ludzi nie tylko z wyglądu, ale też z umiejętności działania, poruszania się i… myślenia.
1 sierpnia 2025 roku polska medycyna weszła do światowej czołówki chirurgii robotowej. Lekarze z Instytutu Medycznego MSWiA w Warszawie i Gdańsku przeprowadzili pierwsze w Europie operacje zdalne pomiędzy szpitalami, z użyciem chińskiego robota EDGE MP1000. To przełom nie tylko technologiczny, ale i organizacyjny, pokazujący potencjał polskich zespołów klinicznych i krajowej infrastruktury IT. Zrealizowano to przy współpracy z polskim dystrybutorem – firmą Meden-Inmed z Koszalina.
Dlaczego roboty? Zapotrzebowanie na wsparcie chirurgiczne rośnie wraz z niedoborem personelu, ze starzeniem się społeczeństwa i z koniecznością spełniania coraz bardziej rygorystycznych standardów leczenia. Początkowo roboty pojawiły się w przemyśle, potem w logistyce, a obecnie coraz częściej spotyka się je w salach operacyjnych jako współpracowników człowieka (co-robotów). To odpowiedź na realne problemy zdrowotne i społeczne. Spełnienie oczekiwań pacjenta i lekarza.
Polska historia robotyki medycznej zaczęła się na Śląsku. Na początku wieku prof. Andrzej Bochenek w katowickiej klinice SUM wprowadził roboty AESOP (prezent jednej ze śląskich firm) i ZEUS (pożyczony na 10 operacji prezent Polonii), a 10 lat później prof. Wojciech Witkiewicz zakupił da Vinci dla szpitala we Wrocławiu. Mimo pionierskich kroków i wielu sukcesów nie udało się utrzymać ciągłości rozwoju. Brakowało strategii, szkoleń i finansowania. Przez 10 lat prof. Witkiewicz, kierujący Towarzystwem Chirurgów Polskich, wykonał z zespołem ok. 400 operacji, czyli tyle, ile powinno się w ciągu jednego roku. Z powodu braku wsparcia finansowego nie wyszkolono więc kadr, tak potrzebnych, jak przekonywaliśmy razem przez wiele lat, dla rozwoju tej dziedziny.
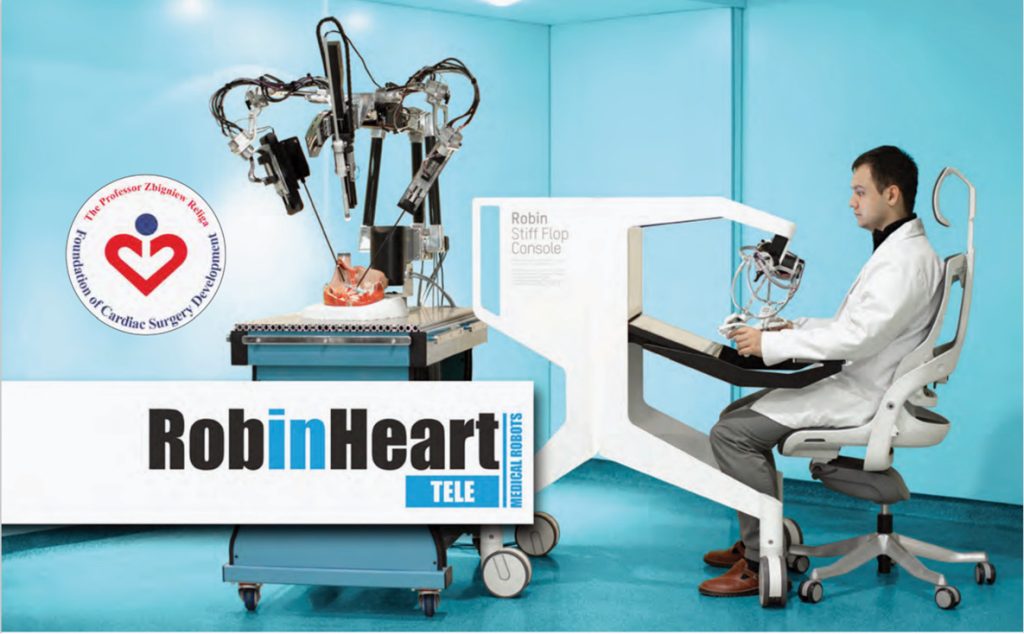
W 2000 r. rozpoczęliśmy z prof. Zbigniewem Religą w Fundacji Rozwoju Kardiochirurgii w Zabrzu projekt polskiego robota chirurgicznego Robin Heart. Pierwsze prototypy dorównywały w wielu aspektach technicznych robotowi da Vinci, ale brak inwestora i wsparcia systemowego nie pozwolił na komercjalizację. W latach 2008-2009 przeprowadziliśmy pierwsze eksperymenty na zwierzętach. W 2010 r. – pierwszą eksperymentalną teleoperację między Zabrzem a Katowicami. Obecnie zespół FRK pracuje nad wersją Robin Heart AI, z funkcją autonomicznej decyzji w sytuacjach awaryjnych. To już nie tylko telemanipulator, ale system wspierający operatora z pomocą sztucznej inteligencji. Robin Heart to od początku oryginalny koncept i jego odważna realizacja. Własność intelektualną chroni 20 patentów i wzorów przemysłowych. Nie naśladowaliśmy amerykańskiego monopolisty. Pewnie go wielokrotnie inspirowaliśmy – podobnie jak i innych obecnych dzisiaj na rynku producentów.
Byli znakomici chirurdzy, inżynierowie, pionierskie doświadczenia oraz oferta zarówno dla medycyny, jak i gospodarki. Razem z prof. Religą, prof. Bochenkiem i prof. Witkiewiczem dowodziliśmy, że przyszłość chirurgii będzie związana z robotyką. Niestety, obiecanej strategii oraz wsparcia dla klinik i dla potencjalnie rodzącego się nowego przemysłu zabrakło. Nie udało się wykorzystać stworzonych możliwości i chaotyczny rozwój rozpoczął się od zakupu robotów i oczywiście braków wyszkolonych operatorów. Mimo to od 2018 r. Polska notuje dynamiczny wzrost liczby operacji robotowych, liczby instalowanych systemów i zainteresowania lekarzy nowymi technologiami.
Przyszłość należy do integracji. Robotyka chirurgiczna będzie rozwijać się w kierunku integracji z AI, rzeczywistością rozszerzoną (AR) i modelami zdalnymi (telechirurgia). Modele finansowania takie jak leasing, pay-per-use czy partnerstwa publiczno-prywatne mogą przyspieszyć adaptację technologii. Roboty będą współpracować z lekarzem nie tylko w sali operacyjnej, ale także jako narzędzia edukacyjne, symulatory czy elementy analizy danych klinicznych.
Co i gdzie – stan robotyki chirurgicznej w Polsce (2024-2025)
Dzięki inicjatywie ekspertów branżowych, takich jak Krzysztof Jakubiak, możliwy jest systematyczny dostęp do danych o chirurgii robotycznej w Polsce. Jego publikacje, m.in. raport Chirurgia robotowa 2025 (1), wypełniają lukę pozostawioną przez instytucje publiczne, które wciąż nie prowadzą regularnego monitoringu tego segmentu rynku.
Stan na rok 2024 obejmował liczbę 50 aktywnych systemów chirurgii robotowej: da Vinci (Intuitive Surgical) – 29 (w tym wersje SP i Xi); Versius (CMR Surgical) – 17; Hugo (Medtronic) – 2 (szpitale w Jastrzębiu-Zdroju i Bolesławcu). Liczba przeszkolonych lekarzy to około 800 (z czego ok. 350 aktywnych operatorów). Liczba operacji robotycznych (2024): ponad 9500. Dla porównania: w 2023 r. wykonano ok. 6700 zabiegów, co oznacza wzrost o 41,8% r/r. Główne dziedziny operacyjne: urologia, ginekologia i chirurgia ogólna (1). W 2025 r. pojawiły się nowe roboty, w tym 3 roboty EDGE MP1000 (Edge Medical) – 1 w Warszawie, 2 w Rzeszowie.
Procedury refundowane przez NFZ:
- Urologia: radykalna prostatektomia (refundacja od 2022 r.),
- Ginekologia: histerektomia (refundacja od 2023 r.),
- Chirurgia ogólna (pilotaże 2025 r.): cholecystektomia, resekcje jelita, operacje przepukliny,
- Onkologia: wybrane procedury robotyczne w leczeniu nowotworów (indywidualne umowy i programy regionalne).
Wydatki publiczne (2024): NFZ przeznaczył 300 mln zł na operacje robotyczne (w ramach leczenia onkologicznego). Liczba beneficjentów: ok. 11 tys. pacjentów w zakresie nowotworów prostaty, jelita grubego i macicy (1).
Wartość rynku, jak donosi raport Upper Finance i Polskiej Federacji Szpitali pt.: Rynek robotyki chirurgicznej w Polsce 2023. Prognoza na lata 2024-2028, w 2023 r. w Polsce wyniosła około 624 mln zł. Do 2028 r. prognozowany jest wzrost do ponad 2,1 mld zł, przy średniorocznym tempie wzrostu (CAGR) na poziomie około 28%. Liczba robotów do 2028 r.: przewidywany wzrost do ok. 130 jednostek (2).
Telemedycyna – jak pokonać dystans między lekarzem a pacjentem i dlaczego
Po postępach przesyłania na odległość informacji, czas na przesyłanie na odległość działania. Do tego niezbędne są roboty.
Zdalne sterowanie narzędziami chirurgicznymi stanowiło od początku jedno z największych wyzwań telemedycyny. W ramach badań nad teleoperacjami testowano różne metody komunikacji, konfiguracje sprzętowe i scenariusze odległości, co pozwoliło określić granice skuteczności i bezpieczeństwa tego typu procedur. Wiedza ta przyczynia się do ciągłego doskonalenia konstrukcji, oprogramowania i infrastruktury robotów chirurgicznych.
Wprowadzenie robotów do medycyny służy osiąganiu celów takich jak:
- większa precyzja i powtarzalność zabiegów,
- standaryzacja procedur,
- zmniejszenie inwazyjności operacji,
- możliwość operowania zdalnego – wszędzie tam, gdzie dostępność specjalistów jest ograniczona.
Obecnie rozwijane roboty chirurgiczne należą do klasy telemanipulatorów (systemy typu master-slave), w których operator ma bezpośrednią kontrolę nad ruchem narzędzi robota. W pętli sterowania znajduje się człowiek – chirurg, który dzięki interfejsowi kieruje robotem wykonującym zabieg. Ten paradygmat oznacza, że robot nie ma prawa wykonać żadnej czynności samodzielnie. Teleobecność chirurga oznacza jego realną zdolność do obserwacji i ingerencji w ciało pacjenta z odległej lokalizacji. Teleobecność jest osiągana poprzez: bezpośredni dostęp do obrazu operacyjnego (wideo 2D/3D), możliwość fizycznej manipulacji narzędziami robota oraz stabilne i niskolatencyjne połączenie sieciowe. Oczywiście oddalenie chirurga od stołu operacyjnego wprowadza też pewne ryzyka, wśród których najbardziej oczywiste związane są z pojawieniem się opóźnienia podczas kontroli robota i awarii w komunikacji (3).
Nasze pionierskie doświadczenia związane są z eksperymentami robotem Robin Heart. W 2010 r. w Fundacji Rozwoju Kardiochirurgii (FRK) przeprowadzono pierwszą polską teleoperację eksperymentalną (ze wsparciem firmy EMITEL):
- Operator: dr Joanna Śliwka (Śląskie Centrum Chorób Serca, Zabrze),
- Konsola sterowania: Robin Heart Shell (FRK, Zabrze),
- Robot lokalny: Centrum Medycyny Doświadczalnej SUM, Katowice,
- Łącze: 13 km, system bezprzewodowy zestawiony z firmą Emitel:
- opóźnienie: sterowanie – 1 ms, wideo – 280 ms (4).
Kolejne eksperymenty obejmowały m.in. połączenia na trasie Meksyk – Zabrze, Zabrze – Dubaj i testy w kopalni Guido (poziom -300 m). Obecnie zespół FRK planuje operacje z wykorzystaniem sieci 5G.
Telemedycyna wywodzi się z projektów kosmicznych NASA i wojskowych Pentagonu. W 1987 r., w Stanford zespół składający się z Phila Greena (SRI) i Josepha Rosena realizuje pierwszy prototyp systemu telepresence surgical system (finansowany przez DARPA i NIH). W 2001 r. w ramach grantu europejskiego Francuz Jacques Marescaux przeprowadza pierwszą w pełni zdalną cholecystektomię (za pomocą amerykańskiego systemu ZEUS) na dystansie 7000 km, z opóźnieniem rzędu 155 ms (Operacja Lindbergh – przez ocean, z Nowego Jorku do Strasburga). Utworzenie pierwszej na świecie telerobotycznej zdalnej usługi chirurgicznej miało miejsce w Kanadzie w 2003 r. Usługa została ustanowiona między szpitalem St. Joseph w Hamilton i odległym o 400 km North Bay General Hospital. Dr Mehran Anvari wykonuje tam w tym roku fundoplikację Nissena przy użyciu ZEUS (opóźnienie wynosiło ok. 150 ms). Rośnie nasze doświadczenie; analizy wskazują, że optymalne opóźnienia to ≤100 ms, a poniżej 300 ms uznawane są za akceptowalne; wartości powyżej prowadzą do pogorszenia wydajności i bezpieczeństwa. W 2019 r. na scenie pojawiają się Chińczycy ze świetnie przygotowaną siecią 5G i swoimi robotami – po raz pierwszy demonstrują możliwość zmniejszenia opóźnienia transmisji obrazu na duże odległości poniżej 100 ms.
Czytaj także: Telechirurgia i nowe technologie
Komentarze





Czytaj najciekawsze teksty branżowe
Dołącz do odbiorców newslettera!
Strefa wiedzy
712 praktycznych artykułów - 324 ekspertów - 16 kategorii tematycznych


















Czytaj najciekawsze teksty branżowe
Dołącz do odbiorców newslettera!